




Control System for Collaborative Robot
Highlights
In 2018, a global company focused on industrial components and digital transformation, engaged PSA to deliver programming for a Collaborative Robot (COBOT) equipped with an array of cameras and lights.
Challenge
Customer Challenge
Reduce a number of defective items of engines while saving labor cost.
Project Objectives
Develop a collaborative robot’s controlling app to easily manage the automation of QA processes of engines, which would help remove human errors, increase accuracy and speed of QA.
Solution
To prove the concept we had to demonstrate:
-
a control computer application(HMI) controlling the operation of the Cobot and vision system
-
ability to configure up to 64 engine types and up to 32 inspection points per engine type;
-
ability to detect specific defect types based on images captured;
-
a full cycle sequence for the programming of the Cobot, performing image captures, and based on a captured image provide pass/fail results for a subset of assembly defects.
To adjust our team to the changing requirements of the client and demonstrate progress in development, we chose agile methodology with bi-weekly sprints.
After defining objectives and limitations, our team created storyboards for HMI, showing User Interface screens, user workflow, and description of user interactions with the robot to define an image collection position. Via the web HMI, it was possible to:
-
Start verification: select engine type, inspection points from the list, start and view step-by-step or all through the end, and then view details on the results for each point, see the overall process and what’s left, pause the process, or see the report at the end;
-
Check verification history: see details on previously completed verifications;
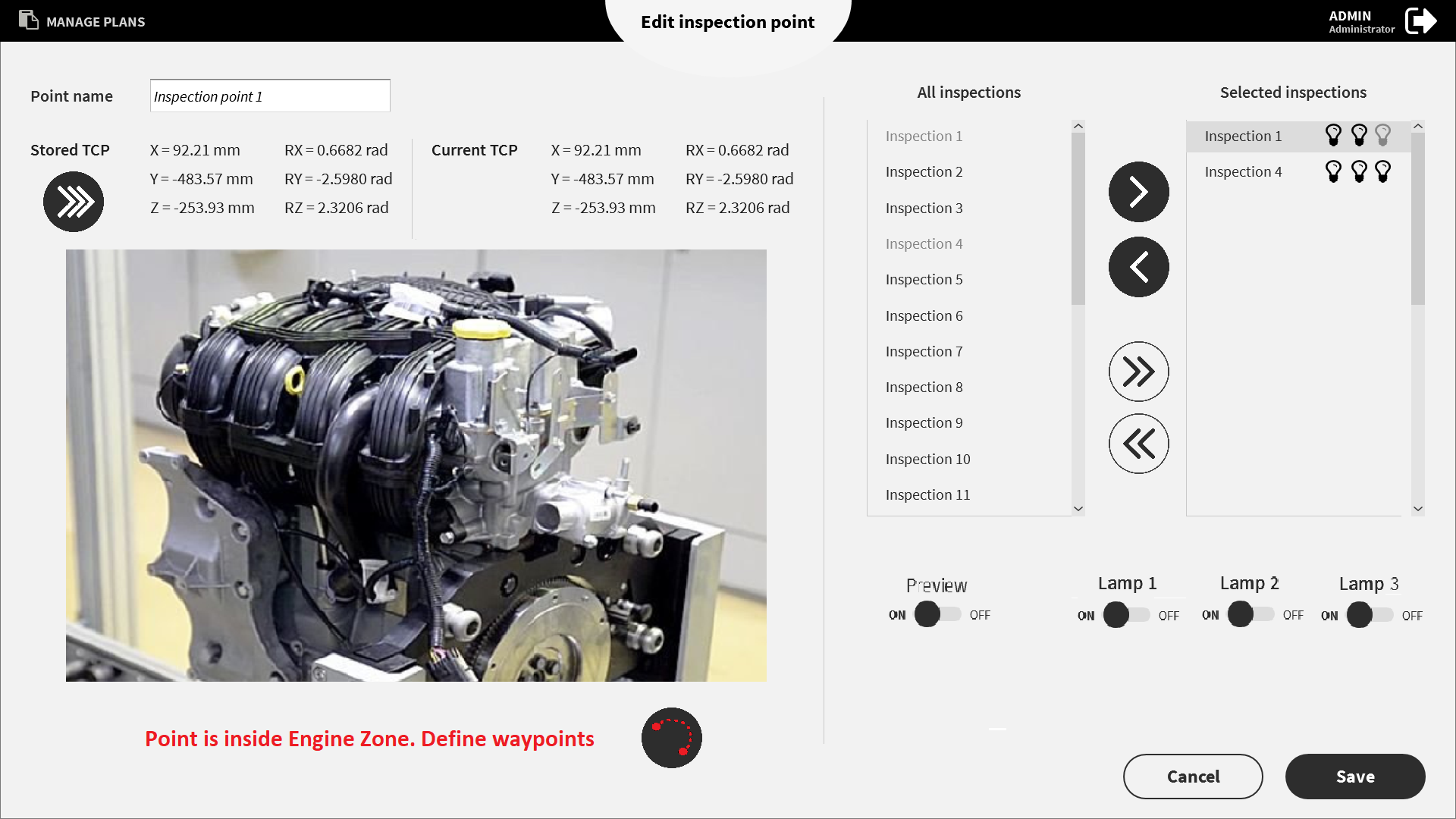
-
Manage plans: edit plans on how to perform verification, each plan consists of inspection points, add details on robot movements (coordinates), UI was showing a warning in case the inspection point is within engine zone (too close to it so Cobot can crash).
-
Go to settings: connection settings, engines details, user details
Workflows and Screen layouts for HMI, used on the control computer showed user interaction and workflow procedures to be used for assembly inspection definition instead of direct Cobot programming.
Our engineers developed software using the Qt framework (UI) and C++ programming language for Windows and Linux platforms. We also realized:
-
robot kinematic model implementation,
-
robot control, monitoring, and operations execution,
-
robot position and movement visualization,
-
checking plans creation, modification, and execution,
-
inspection results displaying and reports generation.
To collect images, we integrated the camera control function into the control computer software. To provide the system with the ability to detect assembly defects, we implemented a function of interaction with the Vision System to analyze collected images. We calculated and automated the path for the robot to move along the engine, in case the robot moved too close to the engine.
Additionally, PSA found, bought, and customized a suitable industrial-grade enclosure with the control computer inside to operate the robot from it. We created drawings of the equipment inside and created power and heat calculations. After that, our engineer traveled onsite to perform the installation of the enclosure.
Development Included
- Functional Requirements definition
- System architecture and design
- HMI design and development
- Hardware procurement and assembly
- Control Software development
- Deployment and Testing in a production environment

Result
The client piloted a proof of concept (POC) for Cobot's control app—a system designed to manage quality assurance in engine assembly, using a collaborative robot equipped with cameras and lights. The further implementation resulted in reducing a number of defective items while increasing the output and saving labor cost.

